First International Workshop On Autonomous Navigation in Unconstrained Environments
In Conjunction with ECCV 2018
September 08, 2018
First International Workshop On Autonomous Navigation in Unconstrained Environments
In Conjunction with ECCV 2018
September 08, 2018



Second Workshop on Autonamous Navigation in Unconstrained Environments website is link:http://cvit.iiit.ac.in/autonue2019/
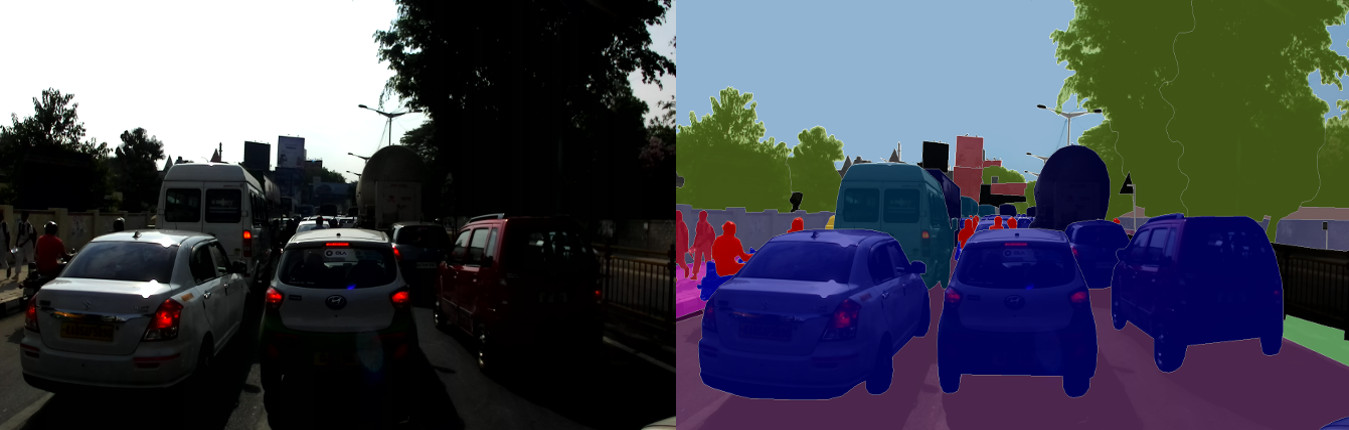
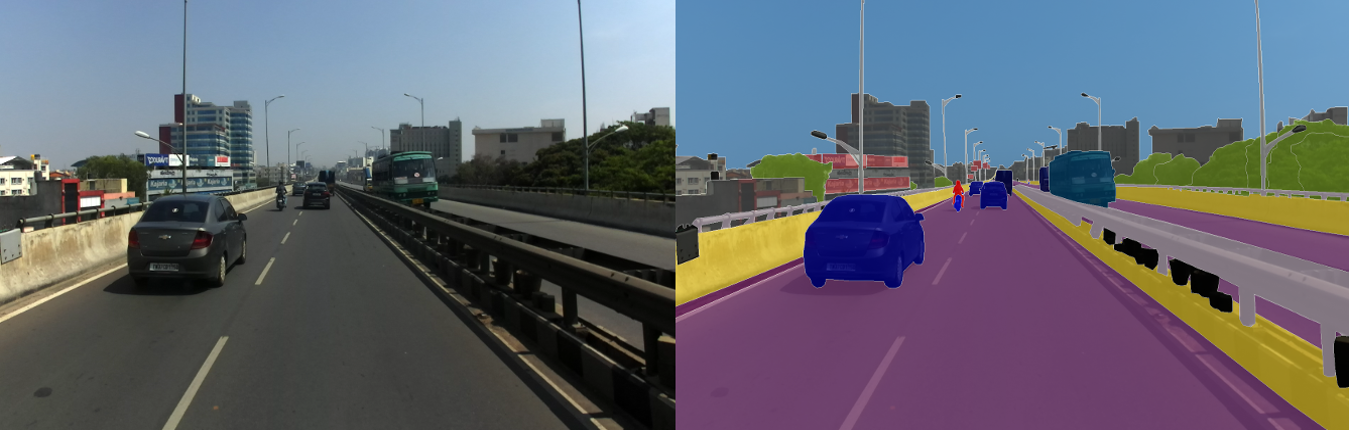
Autonomous driving has recently emerged as a keystone problem for computer vision and machine learning, with significant interest in both academia and industry. Besides being a rich source of research problems for visual perception, learning, mapping and planning, it is also poised to have immense societal and economic impact. Several large efforts from the automotive industry have projected imminent deployment of Level 3 autonomous systems [1], with a few efforts also geared towards Level 5 autonomy in the near future [2]. But reliable solutions have been trained and validated only in controlled environments, while a vast majority of road conditions deviate from the ideal. This workshop calls for intensive engagement from the research community to address this problem and proposes a benchmark dataset with rich annotations in relatively unconstrained conditions to facilitate the effort. A higher level goal is to percolate autonomous driving to domains where road infrastructure is sub-optimal for computer vision and machine learning, but which stand to gain immeasurably from its benefits.
The workshop adopts a broad view of what is entailed by driving in unconstrained environments. Some aspects such as changes in weather, time of day or imaging conditions are already being studied by the community, for instance, under the purview of domain adaptation. However, these have still largely been for environments with organized traffic and favorable infrastructure. Thus, besides those aspects, this workshop also poses the challenge of autonomous driving in less constrained traffic, along with infrastructure that is not always dependable. In particular, we acquire our dataset on roads that present unique challenges for computer vision and machine learning, such as: