Automated real time delineation of brachial plexus in ultrasonography
Peripheral nerve blocks (PNB) are a critical component of multimodal approach for treating post-surgical pain. When compared to opioids alone, PNBs offer superior pain control and are associated with reduced perioperative opioid consumption, improved overall patient satisfaction and reduced hospital stay. Over the past decade, use of ultrasound (US) has dramatically increased the scope of regional anesthesia. Ultrasound technology offers the ability to approach a target in real-time, enabling precise deposition of drug with increased success rates, reduced local anesthetic volume and fewer complications. The success of US guided nerve blocks in turn, depends on accurate interpretation of sono-anatomy which can often be daunting for novice operators. The classical approach of didactics, cadaveric demonstrations and 1:1 illustration are known to be cost-ineffective and time consuming. Simulation based techniques such as embedded electronic tutorials in US machines have consistently shown to be beneficial in enhancing sono-anatomical knowledge among trainees. However, these techniques remain sporadic in practice with limitations in scope and can benefit from newer technologies.
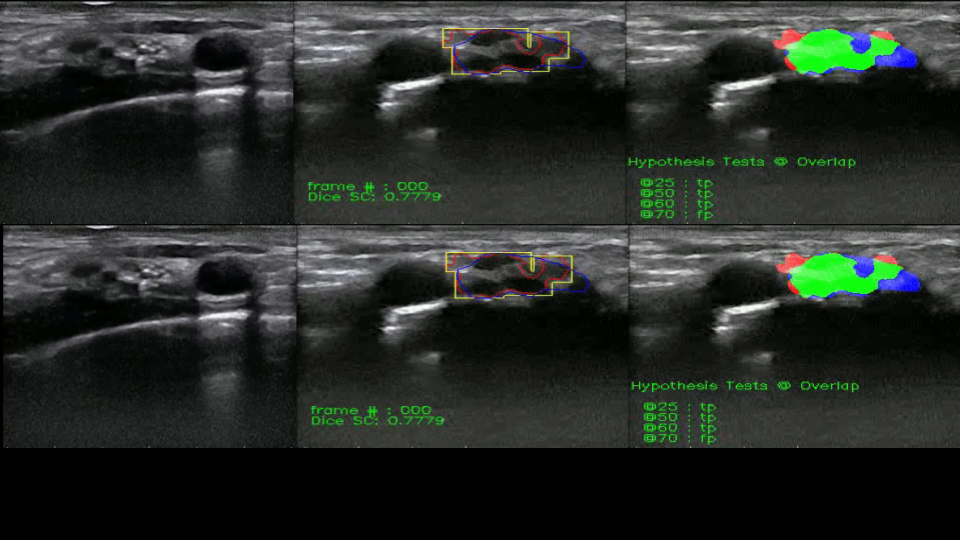
In our study, we present an end-to-end DL approach for real time delineation of SCBP in neck US videos. This prospective study recruited 163 patients who were systematically scanned for SCBP using US. In addition, we also created a dataset of 33 ISC videos to evaluate the capability of the models to differentiate between SCBP and ISC. The resultant videos were then split into individual frames that were annotated by experienced anesthesiologists. A set of standard CNN models were trained as baseline models and their outputs were compared to the originally annotated images. In addition, two separate datasets of 15 videos each were constructed using different US scanners to test for generalizability of the model.
Needle guidance for autonomous robotic ultrasound guided regional anesthesia
Ultrasound guided regional anesthesia (UGRA) involves approaching target nerves through a needle in real-time, enabling precise deposition of drug with increased success rates and fewer complications. Development of autonomous robotic systems capable of administering UGRA is desirable for remote settings and localities where anesthesiologists are unavailable. Real-time segmentation of nerves, needle tip localization and needle trajectory extrapolation are required for developing such a system.
We 1) define automated anesthesia needle targets derived from CNN nerve segmentation predictions 2) design and implement automated needle segmentation, needle tip localization and needle trajectory extrapolation. We also publicly release needle annotations of 6 ultrasound SCBP videos comprising of 1,061 frames. To the best of our knowledge, this is the largest publicly released dataset of annotated needle frames in ultrasound videos created from human subjects. This is also the first study on simultaneous identification of the needle and its regional anesthesia target in given nerve ultrasound videos.