Point Cloud Analysis
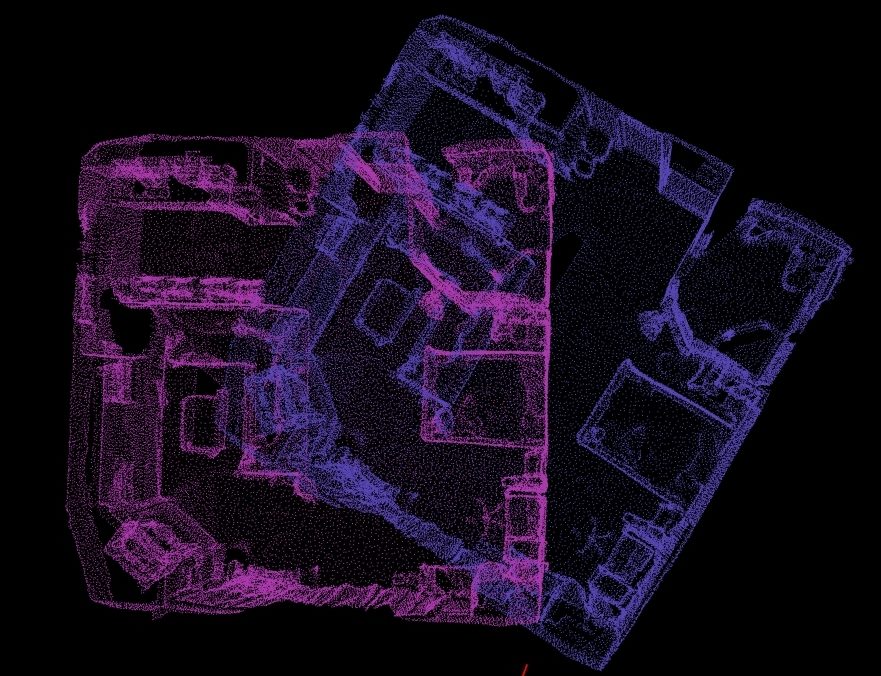
In our research group, we are working on LiDAR scans, specially captured from airborne scanners. We are attempting to segment semantically these scans. As the size of the data is too huge compared with the indoor scans as in the Matterport, S3DIS or ScnanNet dataset, we are exploring methods based on grpah convolution, superpoint graphs etc. Some of the use cases of this segmentaiton task are inspection and maintenance of power line cables and towers. With the lack of precisely labelled data for using deep learning based solutions, we are using statistical properties for segmentation. Anfd this lack of data is also motivating us to come up with simulation of LiDAR scnas that could be used for generation ov virtual 3d scenes.
We are working of formulating a novel approach towards generation of realistic 3D environment by simulating LiDAR scans, initially targeted to wards scenes
from forest environents involving trees, mountains, low vegetation, grasslands etc. Genration of such realistic scnes find applcaitons in AR/VR, smart city
plannning, asset management or distribution systems etc. The major problems that we are solving are generation of semantically coherent set of points that
comprise large objects in the scene. Please watch out this space for more updates on this work.
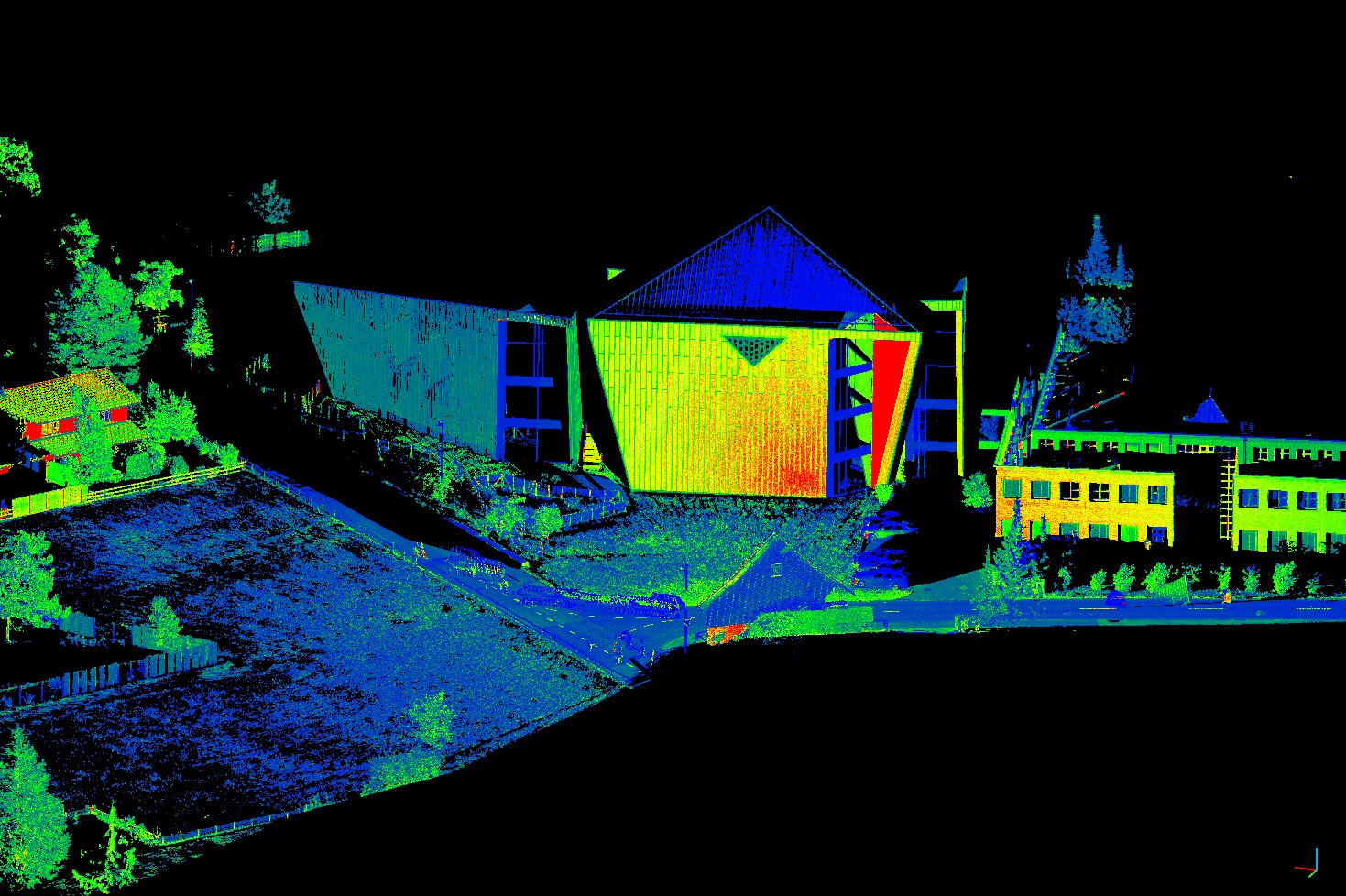
A sample LIDAR scan of a street from semantic3D dataset
Leveraging the power of deep learning networks, we want to come up with a descriptor that will be strong the deep learning version of BShot descriptor. Engineered keep point descriptors have eveloved over the last 2 decades. but with the deep learning era, for images, such descriptos are becoming obselete.
Analogously, for 3D, with large amount of annotated datasets such as Matterport, S3DIS or ScnanNet, research community has started exploring deep learing versions of existing 3D keypint descriptors. Here, we are exploring ways of unsupervised method to learn simutaneous detection of keypoint and generation of robust descriptor.