Data Generation Toolkit for CV and IBR
Introduction
Synthetic data is very useful for validating the algorithms developed for various computer vision and image based rendering algorithms. Since all the information about the scene is available in the case of synthetic data, the researchers can easily compare the results achieved by their algorithm to the ideal values to be generated. High resolution real world data can be acquired from the natural scenes, but the accuracy of the data is generally not very high dude to physical limitations of the imaging devices. These are the main reasons for the popularity of the synthetic data in these fields (CV and IBR).
Algorithms which require just the image and no other information can use some of the standard 3D authoring tools for creating complex scenes which mimic the real world scenes. But most of the CV and IBR algorithms require additional information about the scene (for example depth maps, segmentation, alpha matte, etc). The standard 3D authoring tools do not provide enough flexibility for the users to generate their own representations. This is because most of the popular 3D authoring tools are complex, commercial and closed source softwares. Extending such tools with just the plug-in architecture supported by these softwares may not be intuitive. A simple open source tool which can provide a simple UI for generating various representations is desirable to the research community.
Features & Representations
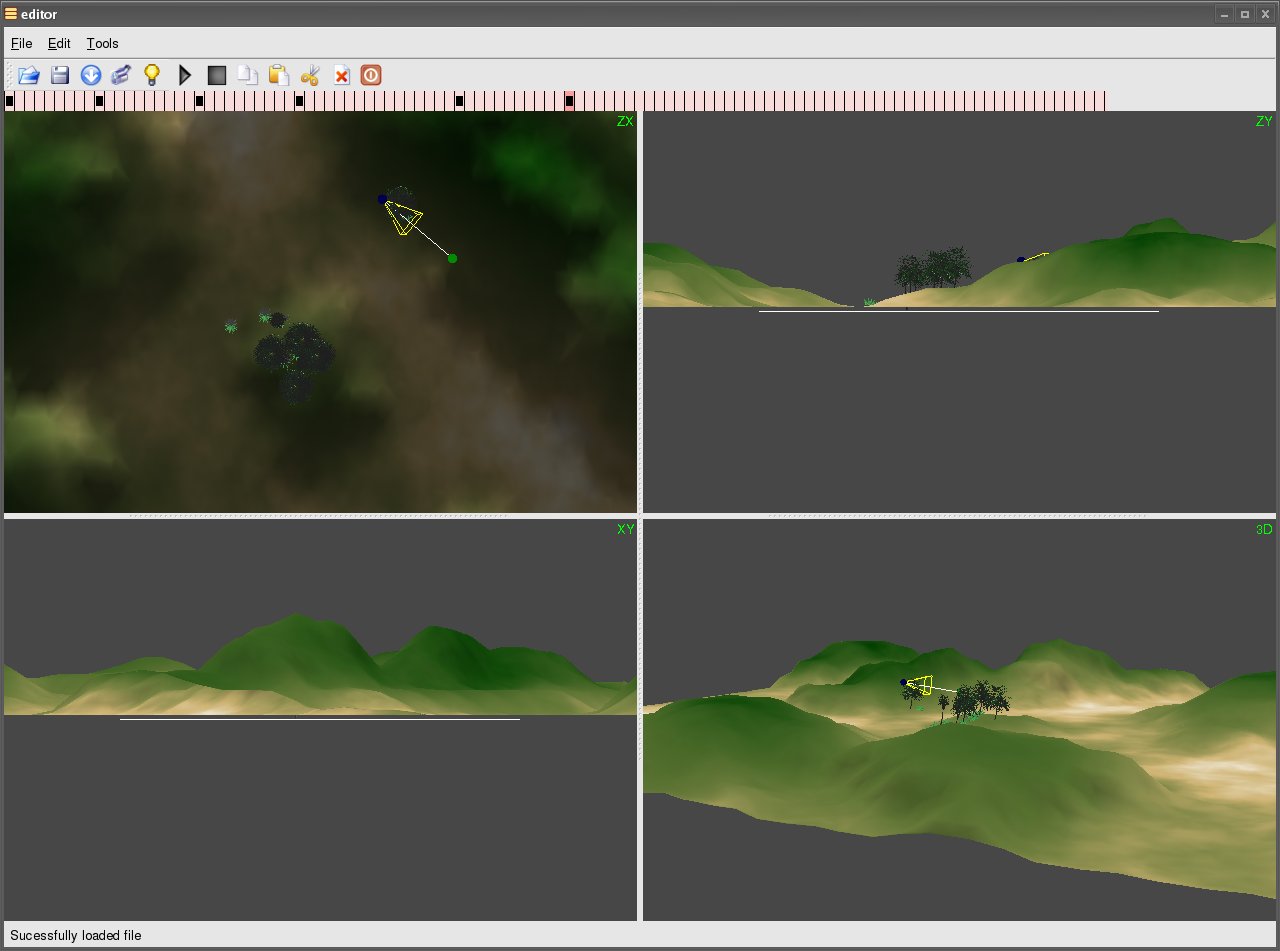
We aim at providing a tool which will enable researchers to generate data sets on their own with ease. The following are some of the key features of our system::
- An interface which is similar to standard 3D authoring tools.
- Import facility for using available 3D models.
- Information about the Resolution at which the image is being rendered.
- Simple click and drag interface for creating complex scenes.
- A key frame interface for creating dynamic scenes with various moving, rotating objects.
- Very intuitive interface for generating high resolution images.
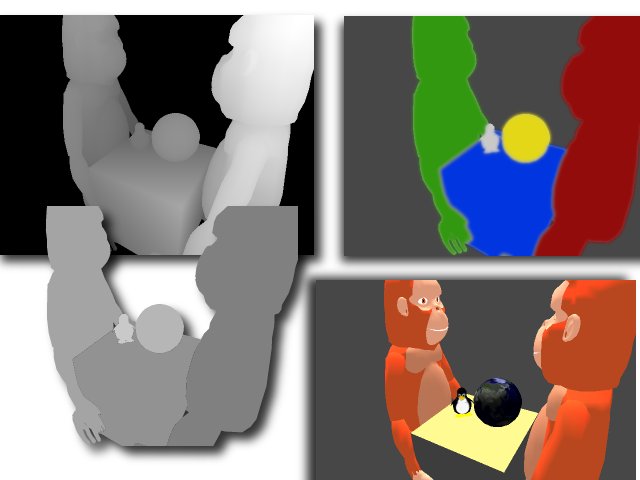 The basic objective of DGTk is to enable generation of complex representations that are required by CV and IBR algorithms with ease. Our tool provides a very simple intuitive interface for generating the following representations of a scene created in our tool::
The basic objective of DGTk is to enable generation of complex representations that are required by CV and IBR algorithms with ease. Our tool provides a very simple intuitive interface for generating the following representations of a scene created in our tool::
- Point correspondences for points in different camera views.
- Camera calibration information for all the cameras in the scene. This is provided in terms of K[R|t] matrices in a text file.
- Layer Depth Images (LDI), this representation was first proposed and used by Shade et al.
- Depth-maps or the depth information as percieved by the camera.
- Object-maps, each pixel in the image is assigned R,G,B values based on the unique id of the object it correspond to.
- Alpha-maps or the alpha matte information of each object in the scene.
Please visit our project page for downloading the tool and some example data sets.
Related Publications
Vamsikrishna and P.J. Narayanan - Data Generation Toolkit for Image Based Rendering Algorithms , The 3rd International Conference on Visual Information Engineering (VIE), 26-28 September 2006 in Bangalore, India. [PDF]
Associated People
- V. Vamsi Krishna
- Prof. P. J. Narayanan