Semantic Classification of Boundaries of an RGBD Image
Nishit Soni, Anoop M. Namboodiri, CV Jawahar and Srikumar Ramalingam. Semantic Classification of Boundaries of an RGBD Image. In Proceedings of the British Machine Vision Conference (BMVC 2015), pages 114.1-114.12. BMVA Press, September 2015. [paper] [abstract] [poster] [code] [bibtex]
Download the dataset from here.
Summary
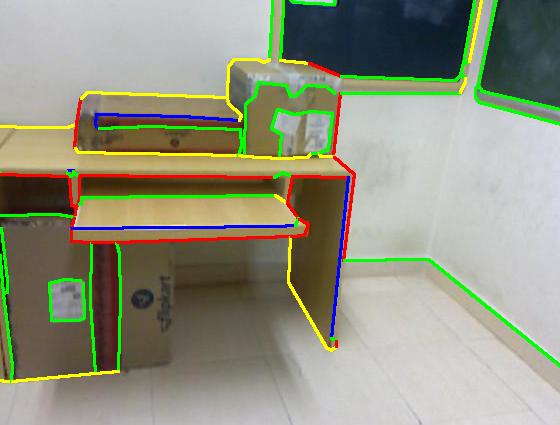
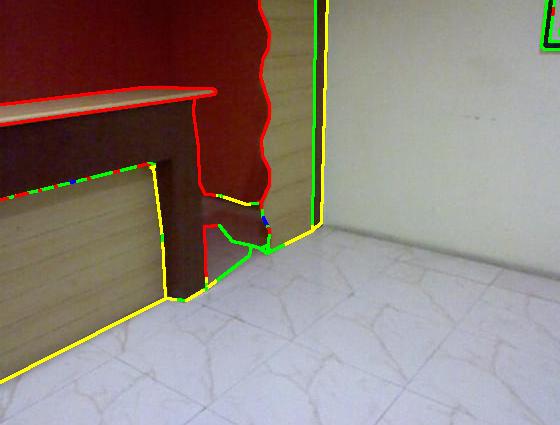
Edges in an image often correspond to depth discontinuities at object boundaries (occlusion edges) or normal discontinuities (convex or concave edges). In addition, there could be planar edges that are within planar regions. Planar edges may result from shadows, reflection, specularities and albedo variations. Figure 2 shows a sample image with edge labels. Figure 1 represents the kinect depth map of that image. This paper studies the problem of classifying boundaries from RGBD data. We propose a novel algorithm using random forest for classifying edges into convex, concave and occluding entities. We release a data set with more than 500 RGBD images with pixel-wise groundtruth labels. Our method produces promising results and achieves an F-score of 0.84.
We use both image and depth cues to infer the labels of edge pixels. We start with a set of edge pixels obtained from an edge detection algorithm and the goal is to assign one of the four labels to each of these edge pixels. Each edge pixel is uniquely mapped to one of the contour segments. Contour segments are sets of linked edge pixels. We formulate the problem as an optimization on a graph constructed using contour segments. We obtain unary features using pixel classifier based on Random forest. We design a feature vector with simple geometric depth comparison features. We use a simple Potts model for pairwise potentials. The individual steps in the algorithm is shown in figure 3.
Figure 3 : This figure summarizes the pipeline of our approach. It shows RGB and depth maps as input (1st image set), with Pb edge detection (2nd image). The classification and MRF outputs are shown in the last two images respectively. Color code: red (occluding), green (planar), blue (convex), yellow (concave).
Experiments and Results
For quantitative evaluation of the method, we have created an annotated dataset of 500 RGBD images of varying complexity. Train to test ratio is 3:2. Our dataset consists of objects such as tables, chairs, cupboard shelves, boxes and household objects in addition to walls and floors. We also annotate 100 images from NYU dataset, which include varying scenes from bed-room, living-room, kitchen, bathroom and so on with different complexities.
We compare our approach with Gupta et al. [1] and show that our approach provides better results. The approach that we present here provides good labels for most pixels with high precision and the performance degrades when there is a significant loss in the depth data. We get an average F-score of 0.82 on the classification results for our data set. The use of smoothness constraints in the MRF achieves an F-score of 0.84. The NYU dataset contains complex scenes containing glass windows and table heads. We achieve an average F-score of 0.74 for the NYU dataset. Below is the quantitative evaluation of our approach along with the comparison with Gupta et al..
Table 1 : Precision, Recall and F-measure for each edge type on our and NYU datasets. 1st and 2nd rows of each set gives the results of our approach and comparison with [1]. The 3rd row in each set shows the results of our approach on NYU dataset.
| |
Occluding |
Planar |
Convex |
Concave |
| Recall |
0.85 |
0.92 |
0.70 |
0.78 |
| Gupta et al. [1] Recall |
0.70 |
0.84 |
0.52 |
0.67 |
| Our recall on NYU |
0.76 |
0.85 |
0.56 |
0.69 |
| Precision |
0.86 |
0.81 |
0.93 |
0.89 |
| Gupta et al. [1] Precision |
0.71 |
0.75 |
0.72 |
0.71 |
| Our Precision on NYU |
0.79 |
0.80 |
0.77 |
0.71 |
| F-measure |
0.86 |
0.86 |
0.80 |
0.83 |
| Gupta et al. [1] F-measure |
0.71 |
0.79 |
0.61 |
0.69 |
| Our Fmeasure on NYU |
0.77 |
0.83 |
0.65 |
0.70 |
|
Table2 : Precision, recall and F-measure for each edge type without and with pairwise potentials.
| |
Occluding |
Planar |
Convex |
Concave |
| Pixel Recall |
0.82 |
0.87 |
0.69 |
0.75 |
| Final Recall |
0.85 |
0.92 |
0.70 |
0.78 |
| Pixel Precision |
0.84 |
0.85 |
0.90 |
0.86 |
| Final Precision |
0.86 |
0.81 |
0.93 |
0.89 |
| Pixel F-measure |
0.83 |
0.86 |
0.78 |
0.80 |
| Final F-measure |
0.86 |
0.86 |
0.80 |
0.83 |
|
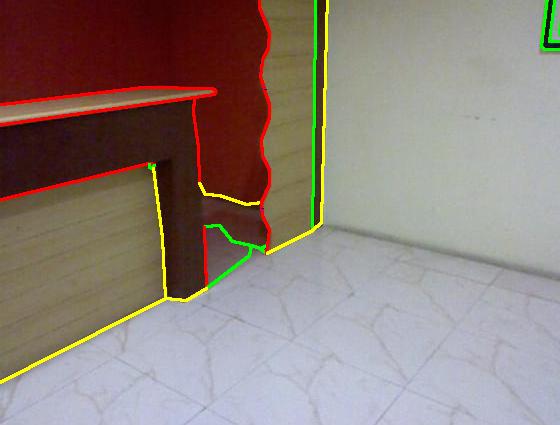
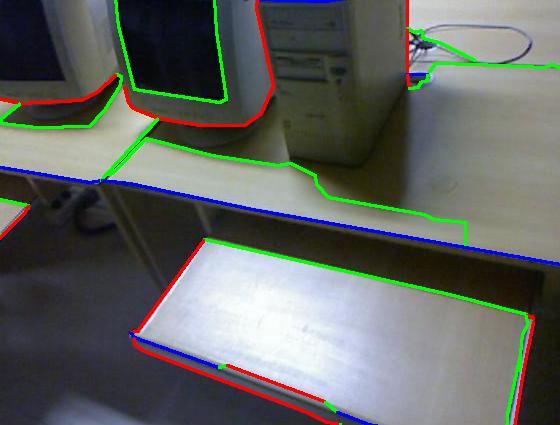
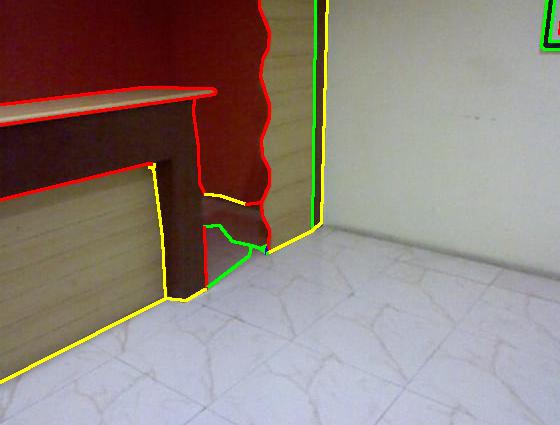
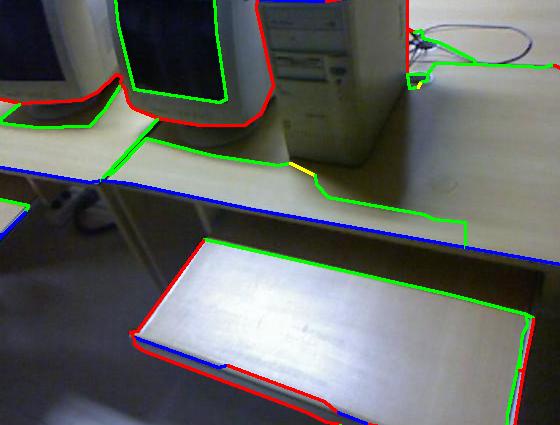
Results on NYU dataset (click to enlarge)
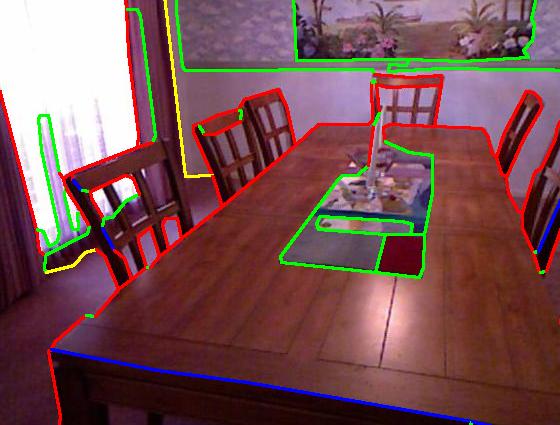
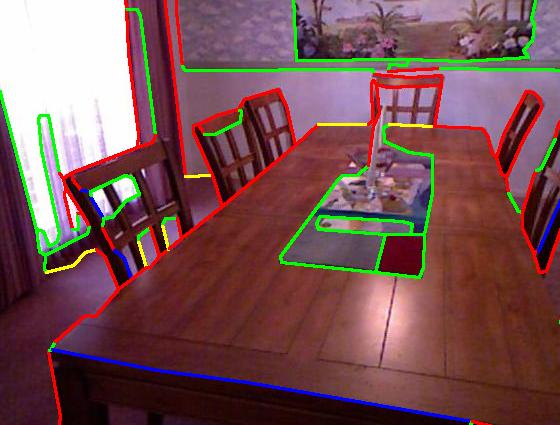
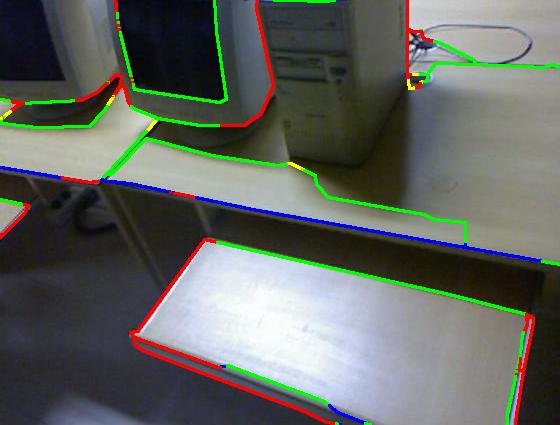
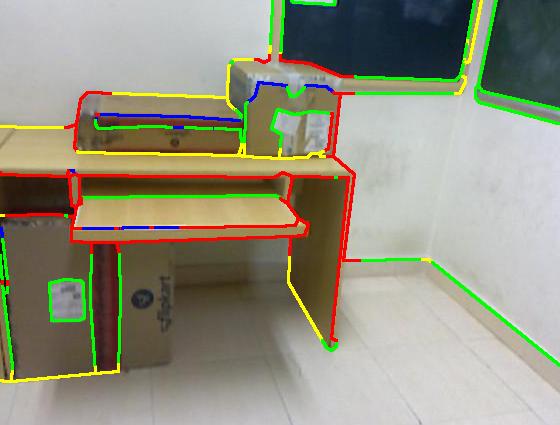
Color code: red (occluding), green (planar), blue (convex), yellow (concave)
| Groundtruth |
 |
 |
 |
 |
 |
| Result |
 |
 |
 |
 |
 |
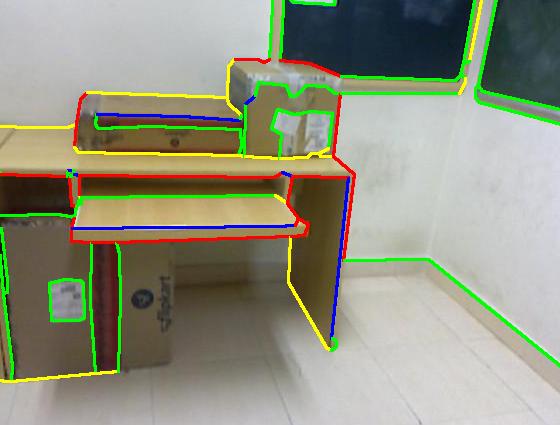
Results on our dataset (click to enlarge)
Color code: red (occluding), green (planar), blue (convex), yellow (concave)
| Groundtruth |
 |
 |
 |
 |
 |
| Our result |
 |
 |
 |
 |
 |
| Sgupta et al. [1] |
 |
 |
 |
 |
 |
References
- S. Gupta, P. Arbelaez, and J. Malik. Perceptual organization and recognition of indoor scenes from rgb-d images. In CVPR, 2013.
Authors
Nishit Soni 1
This email address is being protected from spambots. You need JavaScript enabled to view it.
Anoop M. Namboodiri 1
This email address is being protected from spambots. You need JavaScript enabled to view it.
C. V. Jawahar 1
This email address is being protected from spambots. You need JavaScript enabled to view it.
Srikumar Ramalingam 2
This email address is being protected from spambots. You need JavaScript enabled to view it.
1 International Institute of Information Technology, Hyderabad.
2 Mitsubishi Electric Research Lab (MERL), Cambridge, USA.


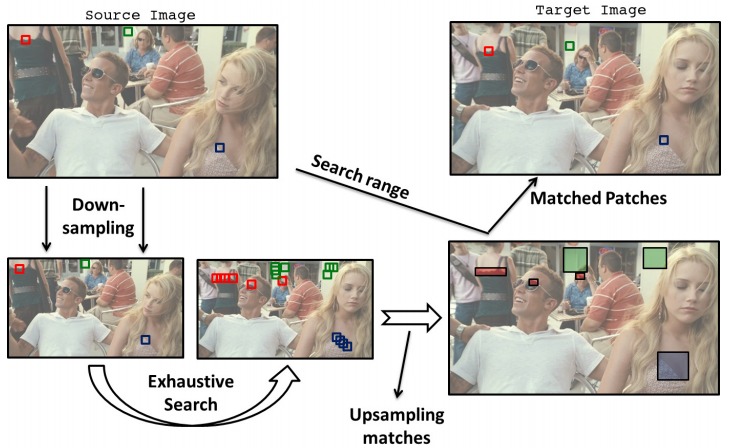 Matching patches of a source image with patches of itself or a target image is a first step for many operations. Finding the optimum nearest-neighbors of each patch using a global search of the image is expensive. Optimality is often sacrificed for speed as a result. In this work, we developed the Mixed-Resolution Patch-Matching (MRPM) algorithm that uses a pyramid representation to perform fast global search. We compare mixed-resolution patches at coarser pyramid levels to alleviate the effects of smoothing. We store more matches at coarser resolutions to ensure wider search ranges and better accuracy at finer levels. Our method achieves near optimality in terms of exhaustive search. Our simple approach enables fast parallel implementations on the GPU, yielding upto 70x speedup compared to other iterative approaches.
Matching patches of a source image with patches of itself or a target image is a first step for many operations. Finding the optimum nearest-neighbors of each patch using a global search of the image is expensive. Optimality is often sacrificed for speed as a result. In this work, we developed the Mixed-Resolution Patch-Matching (MRPM) algorithm that uses a pyramid representation to perform fast global search. We compare mixed-resolution patches at coarser pyramid levels to alleviate the effects of smoothing. We store more matches at coarser resolutions to ensure wider search ranges and better accuracy at finer levels. Our method achieves near optimality in terms of exhaustive search. Our simple approach enables fast parallel implementations on the GPU, yielding upto 70x speedup compared to other iterative approaches.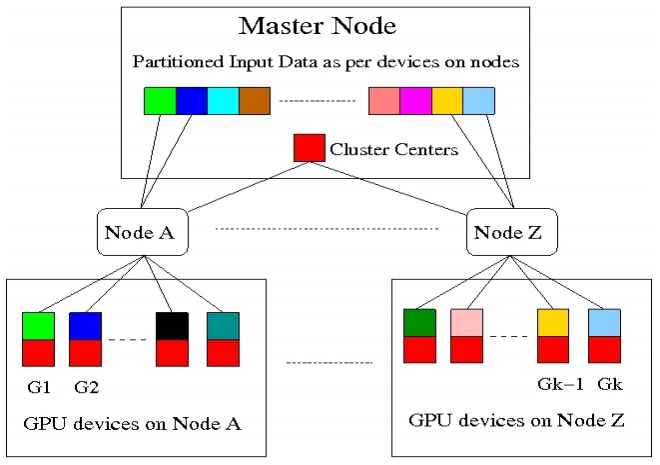 K-Means is a popular clustering algorithm with wide applications in Computer Vision, Data mining, Data Visualization, etc. Clustering large numbers of high-dimensional vectors is very computation intensive. In this work, we present the design and implementation of the K-Means clustering algorithm on the modern GPU. A load balanced multi-node, multi-GPU implementation which can handle up to 6 million, 128-dimensional vectors was also developed. Our implementation scales linearly or near-linearly with different problem parameters. We achieve up to 2 times increase in speed compared to the best GPU implementation for K-Means on a single GPU.
K-Means is a popular clustering algorithm with wide applications in Computer Vision, Data mining, Data Visualization, etc. Clustering large numbers of high-dimensional vectors is very computation intensive. In this work, we present the design and implementation of the K-Means clustering algorithm on the modern GPU. A load balanced multi-node, multi-GPU implementation which can handle up to 6 million, 128-dimensional vectors was also developed. Our implementation scales linearly or near-linearly with different problem parameters. We achieve up to 2 times increase in speed compared to the best GPU implementation for K-Means on a single GPU.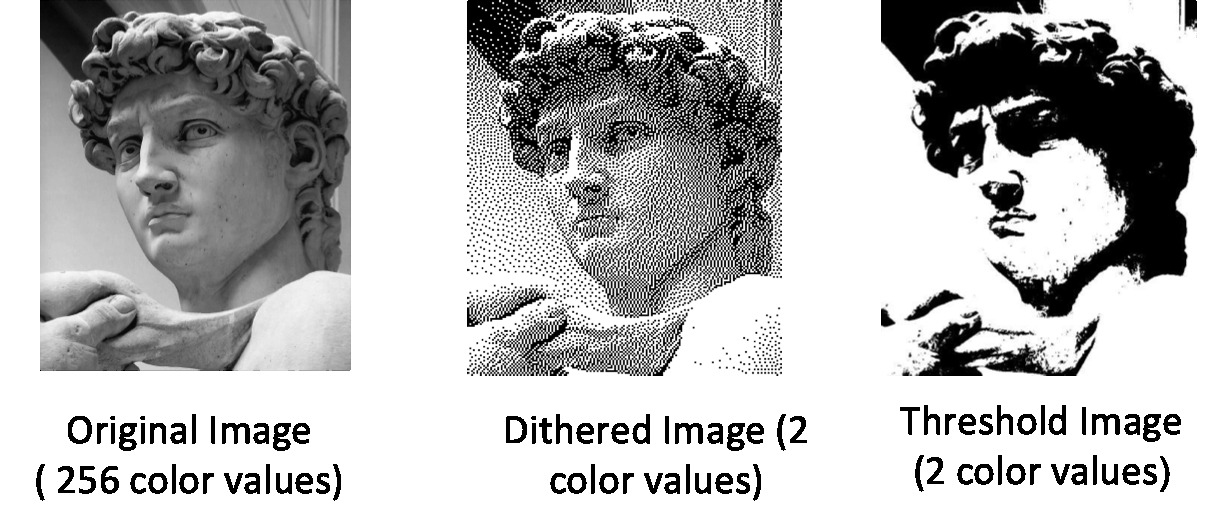 Many image filtering operations provide ample parallelism, but progressive non-linear processing of images is among the hardest to parallelize due to long, sequential, and non-linear data dependency. A typical example of such an operation is error diffusion dithering, exemplified by the Floyd-Steinberg algorithm. In this work, we present its parallelization on multicore CPUs using a block-based approach and on the GPU using a pixel-based approach. We also develop a hybrid approach in which the CPU and the GPU operate in parallel during the computation. Our implementation can dither an 8K x 8K image on an off-the-shelf laptop with Nvidia 8600M GPU in about 400 milliseconds when the sequential implementation on its CPU took about 4 seconds.
Many image filtering operations provide ample parallelism, but progressive non-linear processing of images is among the hardest to parallelize due to long, sequential, and non-linear data dependency. A typical example of such an operation is error diffusion dithering, exemplified by the Floyd-Steinberg algorithm. In this work, we present its parallelization on multicore CPUs using a block-based approach and on the GPU using a pixel-based approach. We also develop a hybrid approach in which the CPU and the GPU operate in parallel during the computation. Our implementation can dither an 8K x 8K image on an off-the-shelf laptop with Nvidia 8600M GPU in about 400 milliseconds when the sequential implementation on its CPU took about 4 seconds.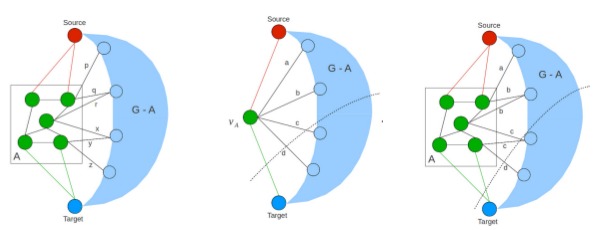 We have developed several basic graph algorithms on the CUDA architecture including BFS, Single Source Shortest Path(SSSP), All-Pairs Shortest Path(APSP), and Minimum Spanning Tree computation for large graphs consisting of millions of vertices and edges. We show results on random, scale free and almost linear graphs. Our approaches are 10-50 times faster than their CPU counterparts, on random graphs with an average degree of 6 per vertex.
We have developed several basic graph algorithms on the CUDA architecture including BFS, Single Source Shortest Path(SSSP), All-Pairs Shortest Path(APSP), and Minimum Spanning Tree computation for large graphs consisting of millions of vertices and edges. We show results on random, scale free and almost linear graphs. Our approaches are 10-50 times faster than their CPU counterparts, on random graphs with an average degree of 6 per vertex.{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}